





超電導リニア設備検査ロボット「Minervα」誕生! 商業運行を支える新技術の全貌
超電導リニア設備検査ロボット「Minervα」誕生!
超電導リニアの運行を支える新しい技術、設備検査ロボット「Minervα(ミネルヴァ)」が、パナソニック アドバンストテクノロジー株式会社(PAD)、東海旅客鉄道株式会社(JR東海)、スズキ株式会社の共同によって開発されました。このロボットの導入により、超電導リニアに関する点検・保全業務の効率化が期待されており、2026年には実用化を目指しています。
開発の背景と目的
山梨リニア実験線には特殊な機械設備が点在しています。これらを点検するには、作業者が長い時間をかけて現地に移動しなければならず、大きな負担がかかります。特に分岐装置のような狭い場所の点検では、身体に負荷をかけながら細かい作業を行わなければならないため、作業者の労力も非常に大きいのです。将来的にリニア中央新幹線が開業すれば、この点検業務が全国的に必要不可欠となり、より多くの労力を必要とすることが見込まれています。
このため、JR東海では労働力不足を見越し、機械設備の外観検査を自動化するための設備検査ロボットの導入を検討してきました。
Minervαの特長
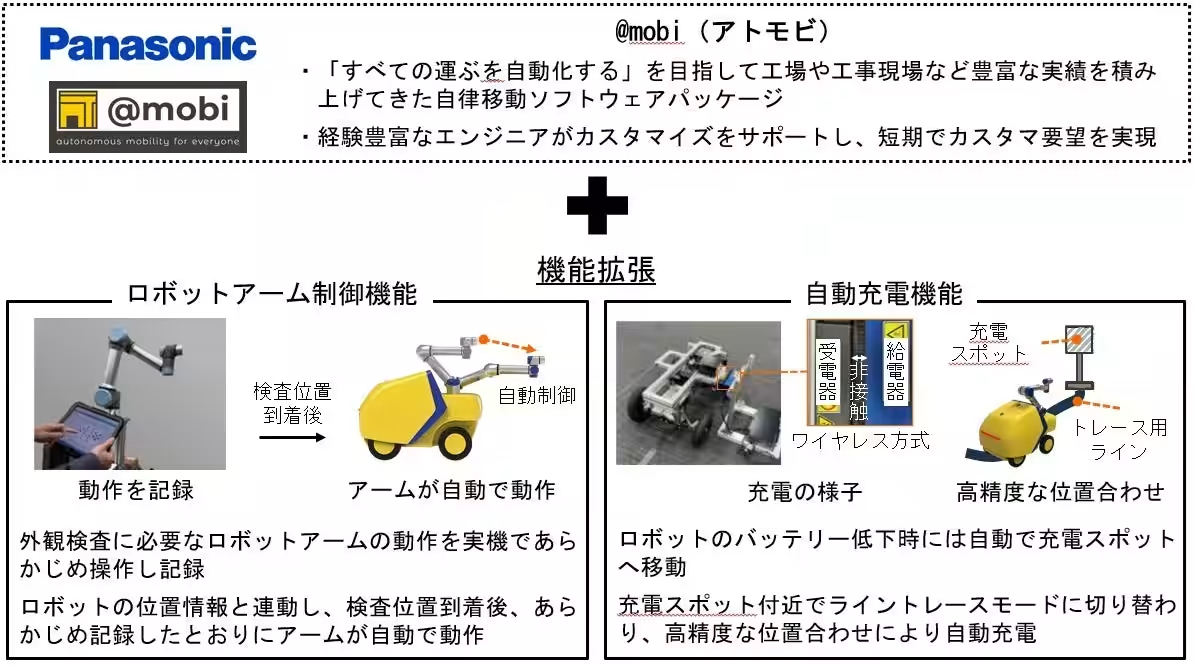
「Minervα」は、スズキが開発中の多目的電動台車「MITRA」を採用しています。この台車は、段差や砂利などの不整地でもスムーズに走行できる性能を持っています。また、ロボットには柔軟に動かせるロボットアームも搭載され、多角的な検査を実施可能です。
さらに、PADが提供する自律移動ソフトウェアパッケージ「@mobi」の導入により、狭い場所でも安全に移動し、点検作業の自動化が実現します。内部には自動充電機能も備え、長時間にわたる運用でも安定的に活動できるよう設計されています。
デザイン面では、プロダクトデザイナーの森澤有人氏が手掛け、引退した「ドクターイエロー」をイメージさせる親しみやすい外観をしています。このデザインは、子供たちにも描きやすいシンプルな形状で、ロボットに対する親近感を高めることでしょう。
期待される効果と今後の予定
この設備検査ロボットをリニア中央新幹線沿線に広げて配置することで、外観検査を自動で行い、作業者の移動時間や点検にかかる労力を大幅に削減することができます。今後の実施スケジュールとしては、2026年2月より、山梨リニア実験線において機能性の確認を行い、実証実験を進める予定です。これにより、より安全かつ効率的な設備管理が実現できることが期待されています。
自動化技術が進化する中で、リニアの運行を支える新しい仲間が登場したことは、鉄道業界全体にとって画期的な出来事です。今後の展開が楽しみです。


トピックス(その他)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。